The Game: Feudal Frenzy
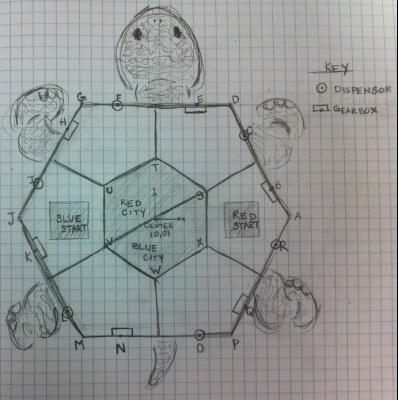
Feudal Frenzy is a competition for survival between two robots. The rounds are 2 min. long and the robots operate autonomously receiving inputs only from mounted sensors and a central Vision Position System.
At the start of a round, the robots are encouraged to explore new territories with each new territory explored int the first 10 seconds earning a robot 30 points. After 10 seconds, the robots receive 10 points for each new territory entered.
During the rest of the match robots capture territories (earning 100 points) by spinning a gearbox located on the wall of a territory. After capturing a territory a robot may then try to get sheep (ping pong balls) from a dispenser located on the other wall of the territory. Each sheep dispensed (whether or not the robot actually has control over it) earns that team 40 points. Each dispenser also has a maximum of 10 sheep, only allowing 5 sheep to be mined per minute. This means that once 5 sheep are taken, neither team can get anymore sheep from that dispenser until a minute has passed.
Near the end of the match, teams who can return their sheep to their side of the walled city in the center of the field earn 40 points for each sheep returned. If they miss and place sheep in the wrong side of the city, the other team would receive those points. At the end of the two minute round, the team with the most points wins.
At the start of a round, the robots are encouraged to explore new territories with each new territory explored int the first 10 seconds earning a robot 30 points. After 10 seconds, the robots receive 10 points for each new territory entered.
During the rest of the match robots capture territories (earning 100 points) by spinning a gearbox located on the wall of a territory. After capturing a territory a robot may then try to get sheep (ping pong balls) from a dispenser located on the other wall of the territory. Each sheep dispensed (whether or not the robot actually has control over it) earns that team 40 points. Each dispenser also has a maximum of 10 sheep, only allowing 5 sheep to be mined per minute. This means that once 5 sheep are taken, neither team can get anymore sheep from that dispenser until a minute has passed.
Near the end of the match, teams who can return their sheep to their side of the walled city in the center of the field earn 40 points for each sheep returned. If they miss and place sheep in the wrong side of the city, the other team would receive those points. At the end of the two minute round, the team with the most points wins.
Strategy I: Circle Clockwise
Looking at the game field we immediately decided that by circling clockwise we could save time and be a more efficient robot. The idea was that our robot could simply drive up next to the gearbox, spin the gears the correct direction to capture it for our team, and then drive forward a bit and with a simple hook push down the lever to get sheep. However, we discovered that while this strategy was mechanically simplistic, the precision that we needed consistently to drive parallel to walls was not possible with the sensors we had.
| 
|
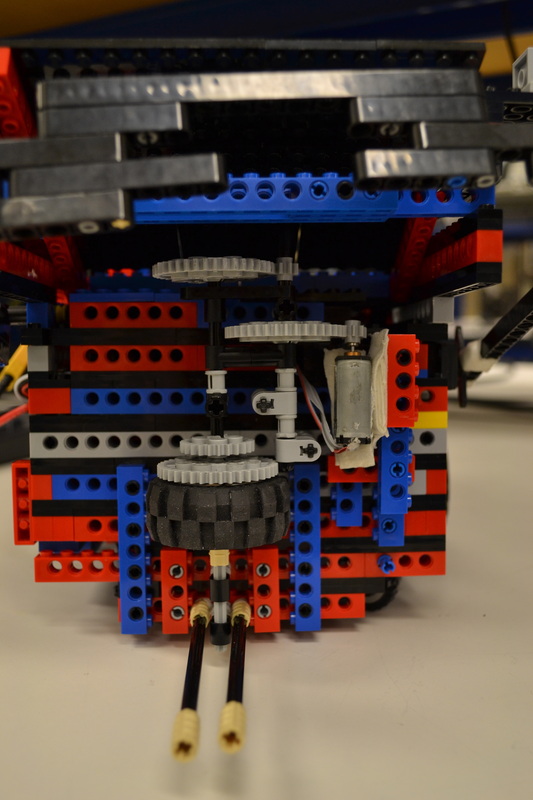
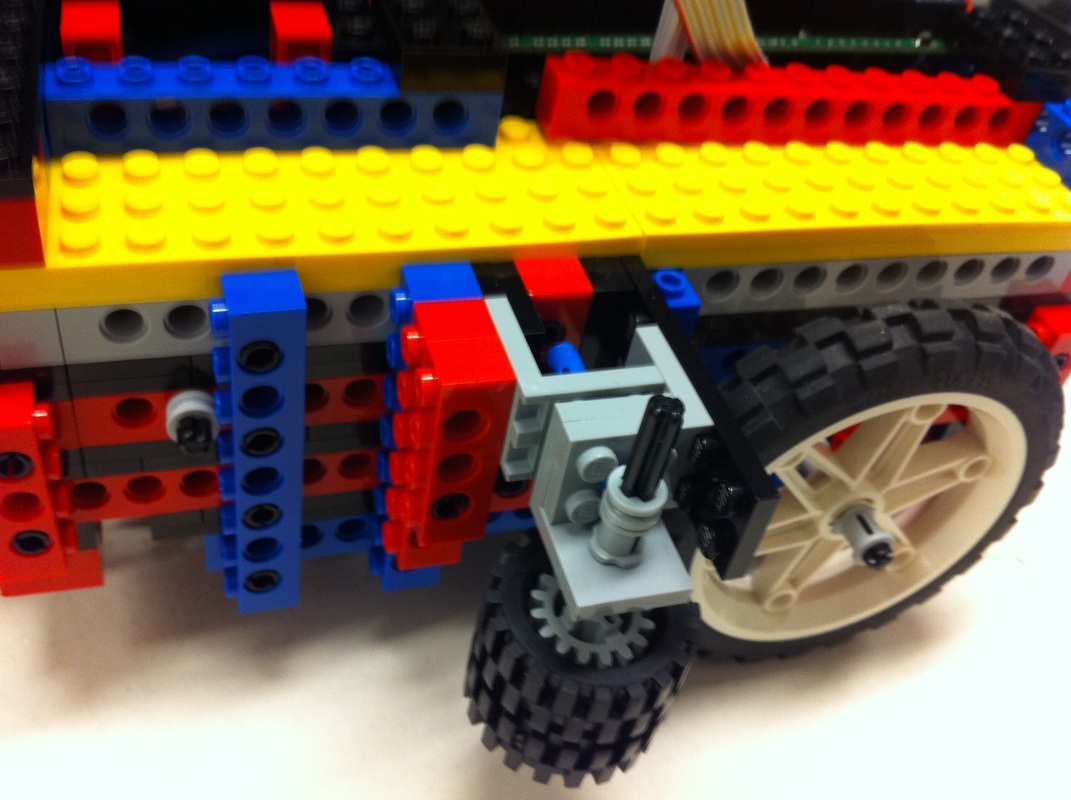
| Strategy II: Function Reliably
Our second strategy aimed to solve the issues with the first strategy. Instead of trying to keep the robot design simple, we prioritized keeping navigation code simple. We moved our spin wheel to the front of the robot where it would make contact with the gearbox even if our robot didn't drive straight up to the gearbox. We also switched out the side hook for a servo with a long arm, allowing the lever to be pulled from a variety of angles as well. With this new strategy our robot was not the fastest robot, but it was able to score a lot more reliably.
|
